スパロボへの道!ロボットを組み立ててみよう Part-2【ヴイストン真ロボット伝説】
■腕の組み立てよう
ここから、本格的なロボットのパーツを組み立てていく。
組み立てマニュアルでは、[腕部分 → 脚部分 → 胴体部分]という順序で組み立てていく。
●右サイドと左サイドを間違えるな
説明書内に記載されている「右サイド」とは、ロボット本体から見て右側を指している。すなわち、ロボットを正面から見た場合、ロボットの「右サイド」は左側に来ることになる。組み立てマニュアルは、この点に配慮してページの左側に「右サイド」、右側に「左サイド」の図が記載されているので、マニュアルに沿って部品を配置していけば、まず間違うことはないだろう。
組み立てで最も多用されるネジは「M2-3 低頭ナベ(マニュアルではAネジ表記)」だが、「M2-3 低頭タッピング(マニュアルではDネジ)」ネジと非常によく似た形状をしている。ネジ山のサイズが異なるのだが、どちらか片方だけを見た場合には、慣れていないと見分けることが難しい。これら二つのネジは、使う場所を間違えるとフレームを壊してしまうこともあるので、ネジ名称を書いた紙皿などを用意し、くれぐれも間違えて使用しないよう注意していただきたい。
※このネジの取り違えが最も多く起こるミスである。特にAネジを使用しなくてはいけないところにDネジを使用した場合、一時的に部品を固定できるのだが、ネジの相手となるネジ山をナメてしまうので、その後のネジの締め直しなどをした場合に、ネジ穴ではなくただの穴になってしまうことが多いのだ。
これらの点に注意し、組み立てマニュアルに沿って作業を進めていこう。
腕部分はパーツ数も比較的少なく、取りかかるにはちょうどよい作業量である。一部、組み立てマニュアルの図でパーツの前後が分かりづらいところもあるが、マニュアルの4ページに掲載されているRB2000の完成写真と見比べると、把握することができると思う。
参考までに、右サイドのサーボブロックを組み立てた写真と、左右両パーツの完成写真を掲載する。左右パーツの並び順は、組み立てマニュアルと同様である。
 |
■脚を組み立てよう
続いて脚部分の組み立てである。腕と比較してややパーツ数も工程数も増えるが、足の先から少しずつロボットの形が現れてくることを想像していただければ、楽しめる作業ではないだろうか。
注意点としては、サーボホルダにサーボモータを取り付けるときは、意外と強めの力で押し込まないとパチンとはまらない。先にサーボモータの出力軸(ギアのような部品が突出した箇所)をサーボホルダに通し、サーボホルダをやや押し広げ気味にしながら押し込めば、うまくはめられると思う。
ここでも参考に、組み立てマニュアルではやや分かりづらい、足裏部品とジョイント部品の配置、サーボモータが初期位置の場合の組み立て後の部品の配置(こちらは右サイドのみ)を掲載しておく。
 |
組み立てマニュアルの17ページにも記載されているとおり、脚部分の組み立ての後にサーボリード(サーボモータから出ている3本束の導線)をまとめておこう。その際、サーボモータの稼働の妨げにならないように細心の注意を払いたい。また、サーボモータのコネクタをCPUボードに接続する時のことを考え、各サーボモータのコネクタに、名称を書いたテープを貼っておくとよいだろう。
※各サーボモータの名称は、組み立てマニュアルの6ページに記載されている。
■胴体を組み立てよう
いよいよ、次は胴体部分の組み立てである。胴体部分を作ると同時に、腕と脚を繋ぎ、RB2000が完成に近付いていくのだ。
ここでは、やや分かりづらいかと思われる CPUベースへのスペーサの取り付け位置(表裏)を掲載しておこう。
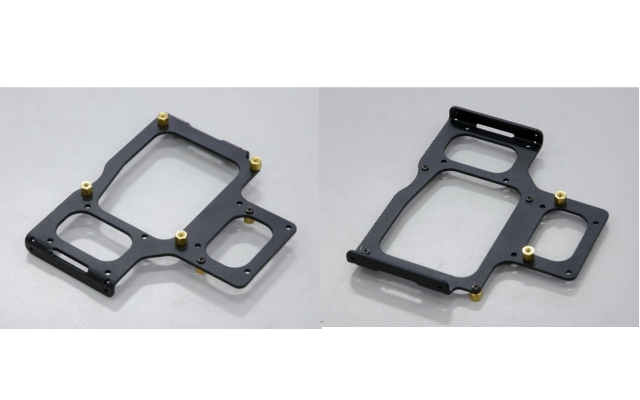 |
スペーサを取り付ける際は、先にネジをCPUベースに通し、そのネジを指で押さえながら反対側からスペーサをねじ込むようにすると、うまくいく。
また、胴体側面のパーツにCPUベースを取り付ける箇所も、ネジの位置がやや分かりづらいかもしれない。写真の矢印で示した位置がネジ位置である。他の穴を使わないように注意しよう。
 |
●CPUボードとサーボモータの接続だ
これらの組み立てが終わると、組み立てマニュアルの23ページのサーボモータからの配線をCPUボード(VS-RC003)に接続する作業となる。
サーボモータからの配線は数が多く、しかも接続位置を間違えるとロボットが正しく動作しないので注意しよう。また、配線が多いため、ボディに詰め込まれた状態になり、思わず手を止めてしまいそうになるが、ここを通り過ぎればほぼ完成であるので、最後のハードルだと思って乗り切ってほしい。
あとは胴体上部に頭部パーツを取り付ければ、RB2000の完成である。
 |
ここまでの所要時間は、工具の扱いにある程度慣れた方であれば、一日で十分に組み立てられる。休日にはちょうど良い作業量ではないだろうか。
■完成! そしてサーボモータの位置補正
さて、やっと組み上がったRB2000だが、組み立てただけでは正しく動作させることはできない。サーボモータの微妙な位置ずれがあるので、これを補正する。ロボットが正しく立つように調整して初めて歩行などのサンプルモーションが再生可能となるからだ。
サーボモータの位置補正については、「ソフトウェア簡単操作ガイド」の13〜19ページに、詳しく記述されいる。
組み立て前のサーボモータの初期位置合わせを、しっかりしてしておくと、このサーボモータの位置補正が大変楽になるのだ。
ちなみに筆者が今回組み立てたRB2000は、サーボモータの位置補正をしない状態では、このような位置ずれが見られた。
※なお、この写真は記事のために撮影したものである。本来、サーボモータの位置補正をしない状態でロボットを直立させることは、サーボモータに過負荷がかかる可能性があるので、絶対に避けて欲しい。
 |
ご覧の通り、やや後ろに傾き気味な姿勢となってしまっている。サーボモータの初期位置合わせをした後でも、サーボホーンの微妙な噛み合わせ等の影響により、この程度のずれが生じるのは避けられないことである。
このロボットを「ソフトウェア簡単操作ガイド」の記述に沿って補正すると、正しい直立状態に設定できるわけだ。
 |
ちなみに、脚の部分の位置補正は、[足首 → ひざ → 大腿]というように、下から上へと順に補正していくと、うまくいくことが多いようだ。
以上、やや駆け足気味にだが、RB2000の組み立てを紹介した。
実際に組み立ててみた感想は、ネジやパーツ数は少ないとは言えないが、作業量が苦になるほど多いというほどではなく、むしろ程よい達成感を得ることができた。
休日のお供にするもよし、パーツ毎に少しずつ組み上げて行くもよし、「ロボットの組み立て」という行為自体を楽しむにも、もってこいのキットだと思う。
次回は、組み立てたRB2000の拡張パーツについて、いくつかご紹介したい。
>>本体の準備編をみる
■ヴイストン ロボットセンター
■ロボットショップ
■ヴイストン真ロボット伝説の記事をもっとみる
・組み立てるだけで大車輪が出来るスーパーロボット「RB2000」
・ロボットもリサイクルの時代だ!最新ロボットでロボカップの勝利を